Whether you’re an architect sketching a new high-rise in the Melbourne CBD, an engineer working on a Brisbane tunnel, or a contractor overseeing a heritage façade restoration in Sydney, understanding 3D laser scanning terminology is essential.
The AEC (Architecture, Engineering, Construction) industry relies increasingly on digital data capture, turning the real-world into accurate digital twins that fuel BIM, clash detection, design and maintenance planning.
Below is the 3D laser scanning glossary that directly explains each term in clear, approachable language. By the end, you’ll navigate conversation confidently, whether you’re discussing service options like 3D scanning for architecture, engineering, construction, or exploring the benefits to your project that 3D laser scanning offers.
Table of Contents
Pricing packages to suit your business
Plans with inclusions for Drone Inspection, Land Surveying, 3D Laser Scanning, Drone Photography & Videography. Get custom quote for your specific requirement.
Below is a curated, alphabetised list of essential laser scanning vocabulary for AEC. Each entry includes a clear definition, and where relevant, related Avian service offerings like CAD drafting, drone facade and roof inspection or our professional 3D modelling and design services.
A
A Scan
Definition: Millions of laser light pulses that accurately measure distances to a surface. Most commonly used in older instruments to collect a single distance point rather than a full 3D “point cloud.”
Accuracy
Definition: The degree to which a measured value matches the true value. In 3D laser scanning, accuracy is often expressed as ± mm (e.g., ±2 mm at 10m).
Service Tie-In: When you book 3D laser scanning and surveying services, you’ll receive deliverables that meet specified accuracy thresholds, crucial for engineering tolerances.
As-Built
Definition: The precise record of a structure or site as it exists, often captured after construction or renovation. As-built models reflect real-world conditions rather than theoretical designs.
B
BIM (Building Information Modeling)
Definition: A digital representation of the physical and functional characteristics of a building. BIM models integrate geometry, spatial relationships, geographic information, and project data.
Background Noise (or “Noise”)
Definition: Unwanted data points in a point cloud, often caused by reflective glare, moving objects (like people or vehicles), or atmospheric conditions (rain, dust). This noise can affect the point cloud sharpness due to the varying reflective properties of building materials.
Building Envelope
Definition: The exterior surfaces of a building (e.g. walls, roof, windows, doors) that separate the interior and exterior environments.
C
Calibration
Definition: The process of periodically checking and adjusting a scanner’s internal parameters to ensure that measurements remain accurate over time and with regular use.
Clash Detection
Definition: The process of identifying interferences (or “clashes”) between different building elements, such as steel beams clashing with HVAC ducts, using coordinated 3D models .
Coordinate System / Datum
Definition: A reference framework that locates points in space. Common coordinate systems in Australia include MGA (Map Grid of Australia) and local state plane coordinates, often referenced to the Geocentric Datum of Australia (GDA).
Control Points
Definition: Known reference locations, or points often marked with high-precision GNSS, that serve as anchors for aligning multiple scans or combining LiDAR with traditional survey data.
D
Data Registration (Scan Registration)
Definition: The process of aligning multiple point clouds into a single, unified dataset. Methods include target-based registration (using reflective spheres or checkerboard patterns) and cloud-to-cloud registration (matching overlapping geometry). This process includes quality control of the scan data to ensure noise and errors are corrected and the individual scans are aligned within acceptable tolerance.
DEM (Digital Elevation Model)
Definition: A 3D representation of a ground surface (terrain) without structures or vegetation. Often derived from LiDAR when flying over vast areas like construction sites, landscapes or rural developments. Engineers and project managers use drone surveying with LiDAR or photogrammetry to generate a DEM, helping them plan cut-and-fill volumes accurately.
DXF / DWG
Definition: CAD file formats widely used in the AEC industry. DXF (Drawing Exchange Format) and DWG (AutoCAD’s native format) store 2D/3D vector data. Point clouds can be imported or linked into these programs for drafting and design overlay.
E
Edge Matching
Definition: Fine-tuning scan registration near scan boundaries to minimise visible seams or gaps. Important when scanning large façades or complex interiors with large volumes of scans.
E57
Definition: A vendor-neutral file format developed by ASTM for storing 3D imaging data. E57 can contain both point data and metadata, ensuring interoperability between different software platforms.
Service Tie-In: Avian delivers raw E57 files to clients needing to run advanced analysis in third-party software, such as Microstation, Inventor, Rhino, Navisworks.
F
Field of View (FOV)
Definition: The maximum angular extent that a scanner or camera can capture from a single position. A wider FOV means fewer setups to cover a large area, but potentially lower point density per unit area.
Service Tie-In: A LiDAR unit with a 360° horizontal and 300° vertical FOV can scan an entire multi-level parking garage from a single position, ideal for Avian’s building inspection services in tight spaces.
Filter (Point Cloud Filtering)
Definition: Post-processing step to remove unwanted points, such as noise, stray measurements or irrelevant objects (e.g., people, vehicles). Filters can be statistical (removing outliers) or geometric (ground, vegetation vs. buildings).
G
Georeferencing
Definition: Aligning a point cloud with real-world coordinates so that the scan matches actual locations on a map. Essential for integrating LiDAR with GIS or CAD applications.
H
HDR (High Dynamic Range) Imaging
Definition: Combining multiple exposures into a single image that captures both bright and dark areas without losing detail. Most scanners take a panorama to colourise the point cloud, often parts of a scene may be in deep shadow.
Horizontal & Vertical Accuracy
Definition: Horizontal accuracy refers to positional error along the X and Y axes (X is east–west, Y is north–south), while vertical accuracy refers to error in elevation (Z axis). Combined, they represent total spatial accuracy.
I
Intensity
Definition: A measure of how strongly a laser pulse reflects off a surface. Intensity values help distinguish materials and can aid in feature extraction (like detecting asphalt patches on a road).
Intersection / Intersection Method
Definition: A surveying technique where two known points and angle measurements converge to locate a third point.
L
Laser Scanner
Definition: A device that emits laser pulses and records the time it takes for each pulse to return. Modern scanners capture millions of points per second, producing dense point clouds.
LiDAR (Light Detection and Ranging)
Definition: The technology underpinning 3D laser scanning, where lasers measure distance by timing of each pulse.
Local Coordinate System
Definition: A project‐specific coordinate system used by surveyors to simplify local measurements. Data is later transformed into a national datum (e.g., GDA2020) if needed.
M
Mesh / Mesh Model
Definition: A 3D representation composed of interconnected polygons derived from a point cloud. Meshes can be textured with real-world imagery for photorealistic visualisation in a process called photogrammetry.
Multiplexing
Definition: In laser scanning, multiplexing refers to the scanner’s ability to channel multiple laser beams simultaneously.
N
Noise
Definition: Unwanted points in a point cloud that do not represent the actual surface. Noise must be filtered out for accurate modeling.
NGO (Non‐Ground Object)
Definition: Points in a LiDAR scan representing objects above ground (e.g., buildings, vegetation, vehicles). Filtering algorithms segregate NGOs from ground points to generate separate DEMs and DSMs (Digital Terrain and Surface Models).
Our Project Portfolio
A few of our past projects from our years of experience of working with 100+ clients in AEC Industry carrying out 3D Laser Scanning, modelling, volumetric calculations, aerial inspections, mapping & contour surveys, aerial land surveying, photomontage and much more.
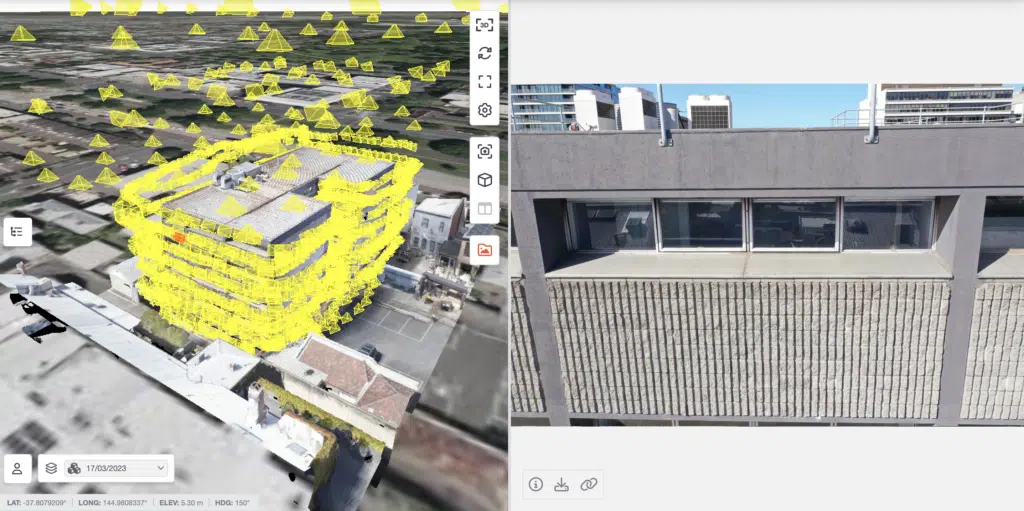
Definition: A geometrically corrected aerial image (“orthorectified”) that has been adjusted for lens distortion, camera tilt and topographic relief. Often derived from drone or fixed wing (aircraft) photogrammetry.
Service Tie-In: Avian’s professional drone services in Melbourne can produce an orthophoto of a site, allowing stakeholders to measure distances directly on the image without perspective distortion.
Overlap (Scan Overlap)
Definition: The percentage of shared area between two scanner positions. Adequate overlap (typically 30–50 percent) is essential for successful scan registration and point cloud creation.
P
Pass (Single Scan Pass)
Definition: One complete rotation (360° horizontal, 300° vertical) or a single flight path of a drone-mounted LiDAR. Multiple passes capture different perspectives, ensuring complete coverage.
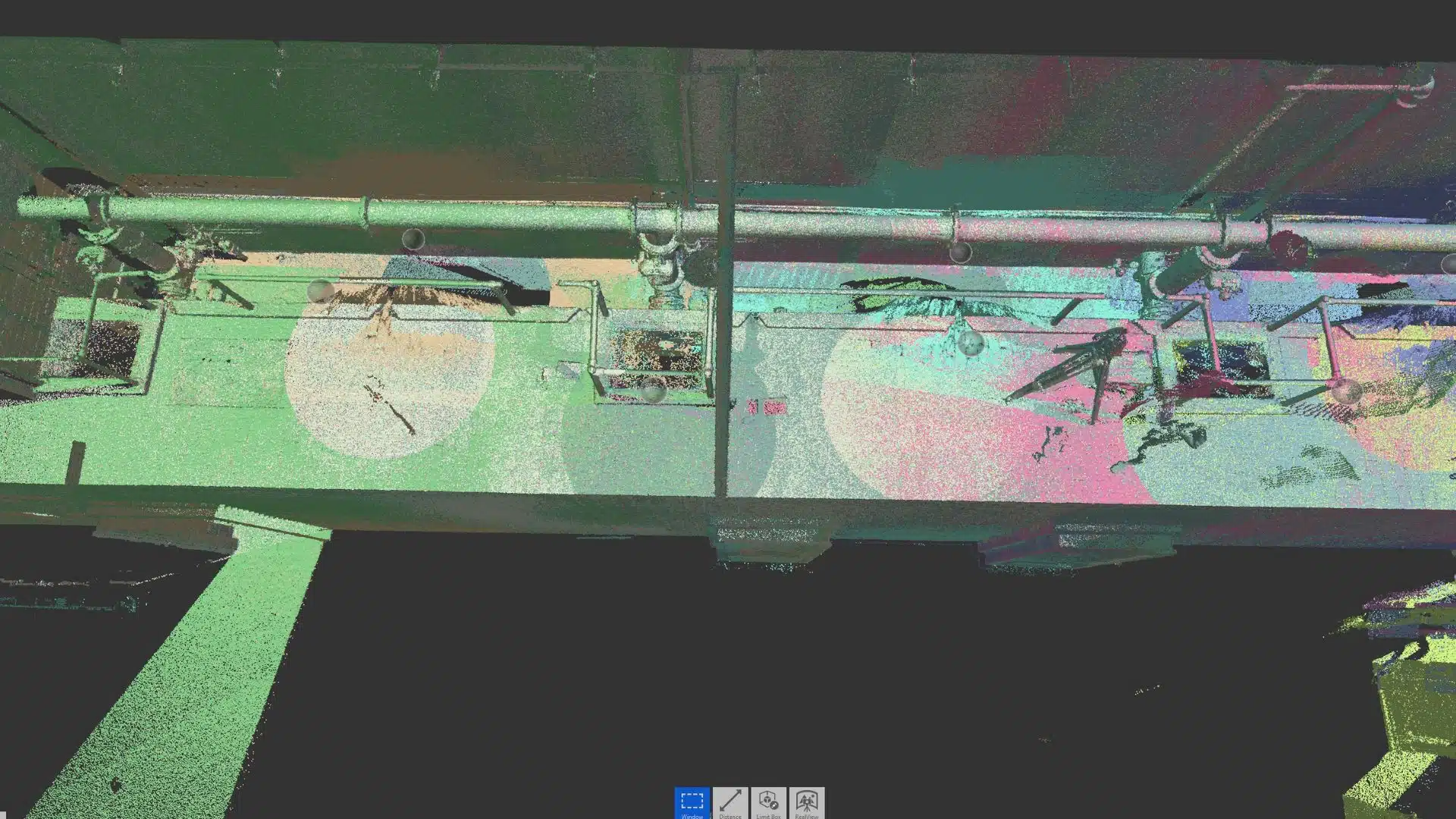
Point Cloud
Definition: A digital collection of millions (or billions) of points in 3D space, each with X, Y, Z coordinates (and sometimes color/intensity). This dense dataset forms the basis for modeling, analysis and design.
Point Density
Definition: The number of points captured per unit area (e.g., points/m²). Higher point density yields finer detail but results in larger file sizes.
Processing (Point Cloud Processing)
Definition: Post-capture steps including registration, filtering (noise removal), classification (ground vs. non-ground), meshing and exporting to desired formats.
Q
Quality Control (QC)
Definition: Ensuring that scan data meets project requirements, checking accuracy, completeness and consistency across multiple scans. QC methods include revisiting a control point to confirm coordinates or comparing scan data against known benchmarks.
Quick Terrain Model (QTM)
Definition: In drone LiDAR systems, QTM refers to on-board processing that generates a coarse terrain model immediately after a flight.
R
Range
Definition: The maximum effective distance between the scanner and the target surface. High-end TLS (terrestrial laser scanning) units can reach up to 1 km in ideal conditions, while handheld or drone units may top out at 200–300 m.
Reflectivity / Reflectance
Definition: The proportion of laser energy reflected by a surface. Reflectance values help differentiate materials (e.g., asphalt vs. concrete) and can be used to detect surface conditions (e.g., moisture, rust).
Resolution
Definition: The smallest discernible detail in a point cloud. Higher resolution (i.e., more points per square metre) means finer detail but larger file sizes and longer processing times.
S
Scintillation
Definition: Rapid fluctuations in laser return signal due to air turbulence or particulate matter, similar to “twinkling” of stars. Scintillation can introduce noise or slight inaccuracies.
SLAM (Simultaneous Localisation and Mapping)
Definition: A method where a mobile scanner (often handheld or mounted on a vehicle/robot) maps the environment while simultaneously determining its own position.
Software Platform
Definition: Applications used to process, analyse and visualise point clouds. Common platforms include Leica Cyclone, Trimble RealWorks, Autodesk Recap, and open-source CloudCompare.
T
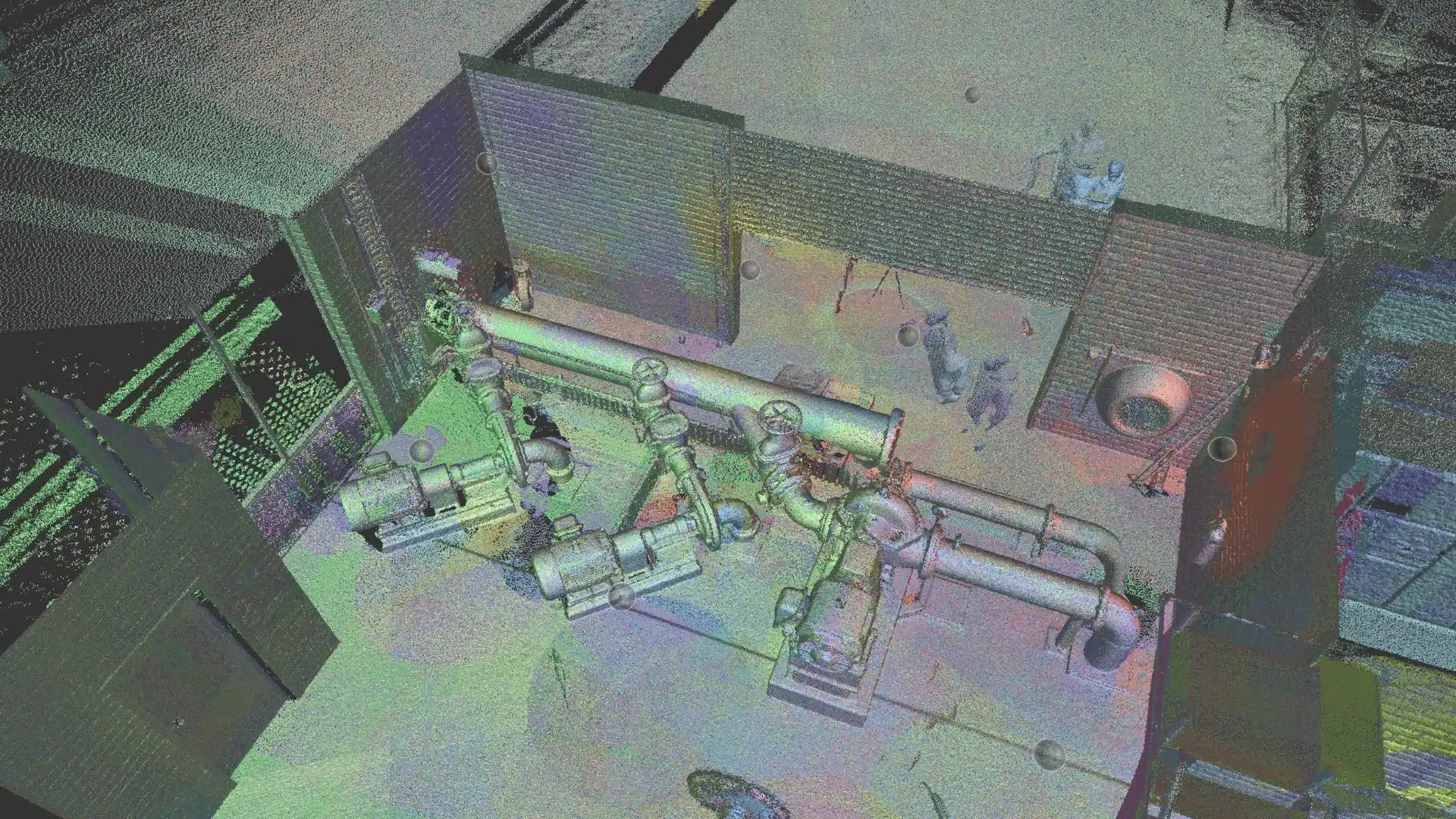
Terrestrial Laser Scanning (TLS)
Definition: Ground-based LiDAR scanning from a stationary tripod. TLS captures high-density point clouds of building exteriors, interiors, infrastructure and industrial sites.
TOF (Time of Flight)
Definition: A laser range-finding principle where the scanner measures the time it takes for a laser pulse to travel to a surface and back. TOF is common in long-range scanners.
U
Unstructured Point Cloud
Definition: A raw collection of points without connectivity information. Before meshing or surface reconstruction, the point cloud remains “unstructured.” Users apply algorithms to classify and structure point cloud data.
V
Vegetation Penetration
Definition: LiDAR’s ability (especially airborne) to capture ground points under sparse vegetation.
Vertex
Definition: A single point in a mesh or 3D model, connected to others by edges and faces. Vertices store spatial coordinates and can carry attributes like RGB color or intensity.
Voxel (Volumetric Pixel)
Definition: A 3D equivalent of a pixel, representing a value on a regular grid in a volume of space. Voxels are used in volumetric analyses.
W
Weighted Registration
Definition: A method where certain control points or scan overlap regions receive more emphasis during registration.
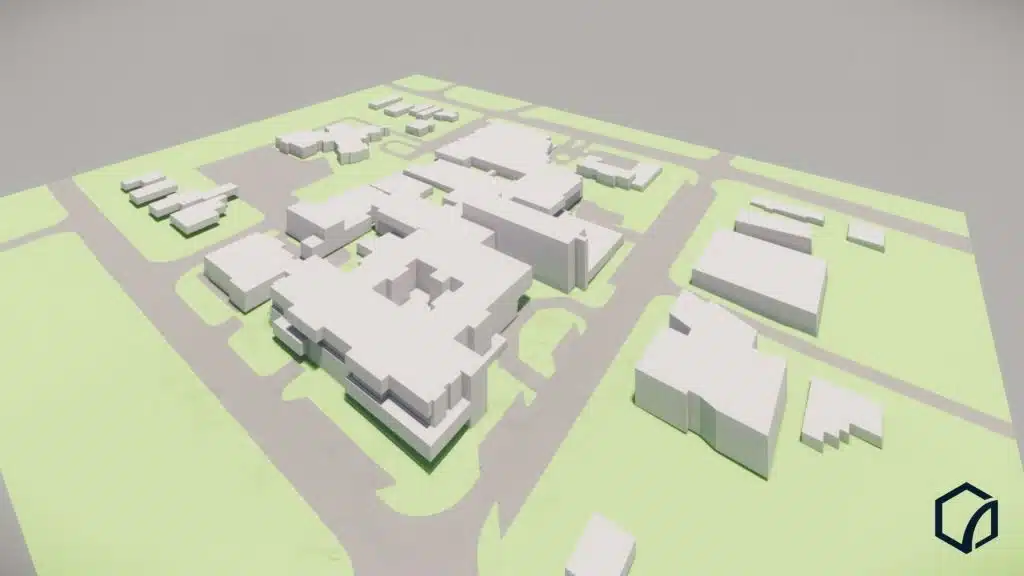
Wireframe Model
Definition: A representation of a 3D object by its edges and vertices only. Useful for quick visual checks but lacks surface and texture detail.
Z
Z-Fail / Z-Buffer
Definition: Techniques in computer graphics that handle occlusion when rendering 3D scenes. These methods determine which points or faces are visible from a viewpoint.
Zone of Uncertainty
Definition: An area around each scanned point where the exact surface location is unknown within a margin of error, often visualised as a sphere or cylinder representing measurement uncertainty.
Strengthen Your 3D Laser Scanning Vocabulary
You’ve just explored over 50 key entries in our 3D laser scanning glossary. Whether you’re new to the field or a seasoned AEC professional, understanding the laser scanning vocabulary AEC helps you communicate more effectively with surveyors, engineers and service providers.
Remember, technology evolves rapidly. Terms like SLAM, voxel and point cloud are already mainstream; tomorrow, we may be talking about AI-driven automatic feature extraction or real-time streaming point clouds. Keeping your 3D laser scanning terminology sharp ensures you thrive in this digital landscape.
Feel free to bookmark this 3D laser scanning glossary and share it with colleagues who are embarking on their next AEC project.
Whether you’re scoping a small-scale renovation or a multimillion-dollar infrastructure build, a strong grasp of laser scanning vocabulary of AEC makes all the difference. For more information, reach out to a reliable partner like Avian Australia to discuss your unique project needs.
Have a custom requirement ?
Get a quick estimate for your specific project requirements with listed inclusions/exclusions.